

Servo motor giải pháp điều khiển chính xác tốt nhất
Động cơ Servo hay Servo motor là động cơ có hệ thống điều khiển phản hồi, hoạt động theo nguyên lý phản hồi vòng kín, luôn điều chỉnh dựa trên tín hiệu từ encoder hoặc cảm biến vị trí giúp duy trì hoạt động chính xác theo yêu cầu.
Động cơ Servo có 3 dòng chính là AC, DC và Servo bước
1. Động cơ Servo là gì ?
Động cơ hoạt động dựa trên phản hồi vòng kín:
- Bộ điều khiển gửi tín hiệu điều khiển đến động cơ.
- Động cơ quay theo tín hiệu nhận được.
- Encoder phản hồi vị trí thực tế về bộ điều khiển.
- Bộ điều khiển so sánh tín hiệu đặt và tín hiệu phản hồi, nếu sai lệch sẽ điều chỉnh lại ngay lập tức.
Kết quả: Động cơ luôn đạt vị trí và tốc độ mong muốn với độ chính xác cao.
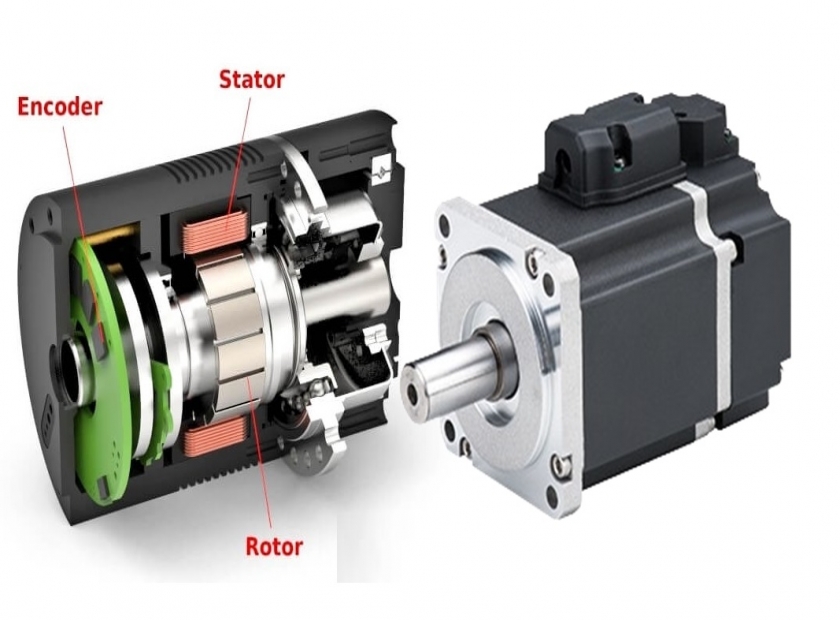
1.1 Cấu tạo
Một hệ thống servo gồm 3 phần chính:
- Động cơ (Motor) – Bộ phận chính tạo chuyển động.
- Bộ điều khiển (Servo Controller/Driver) – Nhận tín hiệu từ PLC hoặc bộ điều khiển khác để điều chỉnh tốc độ và vị trí.
- Bộ phản hồi (Encoder/Resolver) – Cung cấp thông tin vị trí chính xác của động cơ về bộ điều khiển.

1.2 Ứng dụng
* Trong công nghiệp:
- Hệ thống CNC, cắt laser, cắt plasma.
- Băng chuyền tự động, dây chuyền sản xuất.
* Trong robot & tự động hóa:
- Điều khiển cánh tay robot, in 3D.
- Xe tự hành AGV, máy in công nghiệp.
* Trong ô tô & hàng không:
- Hệ thống lái tự động, điều chỉnh góc cánh máy bay.
- Điều khiển cửa tự động, kính chiếu hậu điện.
* Trong đời sống hàng ngày
- Cửa tự động – Kiểm soát mở/đóng trơn tru.
- Máy ảnh DSLR – Điều chỉnh tiêu cự ống kính.
- Tay cầm chơi game – Phản hồi rung động khi chơi game.
2. So sánh ưu và nhược điểm giữa động cơ Servo và động cơ bước vòng kín
| Tiêu chí | Động cơ Servo | Động cơ Bước Vòng Kín |
| Nguyên lý hoạt động | Điều khiển bằng tín hiệu analog/digital, phản hồi vị trí liên tục. |
Điều khiển theo từng bước, phản hồi vị trí khi cần hiệu chỉnh.
|
| Độ chính xác | Rất cao (sai số thường dưới 0.01°). |
Tương đối cao (sai số nhỏ hơn động cơ bước mở vòng, nhưng không bằng servo).
|
| Mô-men xoắn | Mô-men cao và ổn định, có thể điều chỉnh theo tải. |
Mô-men xoắn cao ở tốc độ thấp, nhưng giảm dần khi tốc độ tăng.
|
| Khả năng kiểm soát tốc độ | Kiểm soát tốc độ mượt mà, chính xác ở dải tốc độ rộng. |
Tốt ở tốc độ thấp đến trung bình, nhưng không mượt ở tốc độ cao.
|
| Hiện tượng mất bước | Không có do phản hồi vị trí liên tục. |
Hạn chế mất bước so với động cơ bước mở vòng, nhưng vẫn có thể xảy ra nếu tải thay đổi đột ngột.
|
| Khả năng đáp ứng tải thay đổi | Rất tốt, tự động điều chỉnh mô-men xoắn theo tải. |
Tốt hơn động cơ bước mở vòng nhưng không linh hoạt như servo.
|
| Chi phí | Cao hơn. |
Thấp hơn servo, nhưng cao hơn động cơ bước mở vòng.
|
| Ứng dụng phổ biến | Máy CNC, robot công nghiệp, hệ thống servo drive. |
Máy in 3D, máy CNC nhỏ, hệ thống tự động hóa cần độ chính xác cao nhưng chi phí tối ưu.
|
- Servo Motor và Động cơ bước vòng kín (Closed-loop Stepper Motor) đều là hai loại động cơ có khả năng điều khiển chính xác vị trí và tốc độ. Tuy nhiên, mỗi loại có những ưu điểm riêng và phù hợp với từng ứng dụng khác nhau.
- Động cơ servo: Là động cơ có hệ thống phản hồi vòng kín sử dụng encoder hoặc resolver để đo chính xác vị trí, tốc độ và mô-men xoắn.
- Động cơ bước vòng kín: Là động cơ bước nhưng có thêm encoder, giúp khắc phục tình trạng mất bước và cải thiện hiệu suất so với động cơ bước mở vòng.
3. Lưu ý khi chọn động cơ
| Chọn động cơ servo nếu: | Chọn động cơ bước vòng kín nếu: |
| Cần độ chính xác cực cao. | Cần sự chính xác cao |
| Cần điều khiển tốc độ mượt mà. |
Hệ thống hoạt động ở tốc độ trung bình, không yêu cầu phản hồi liên tục.
|
| Ứng dụng có tải thay đổi liên tục, yêu cầu mô-men ổn định. | Không cần điều chỉnh mô-men xoắn linh hoạt. |
| Chấp nhận chi phí cao hơn. | Chi phí thấp hơn |
4. Các lỗi thường gặp của động cơ Servo và cách khắc phục
4.1. Lỗi mất tín hiệu phản hồi (encoder error)
* Biểu hiện:
- Hệ thống báo lỗi encoder feedback error.
- Động cơ hoạt động không ổn định hoặc dừng bất thường.
- Giá trị vị trí bị sai lệch.
* Cách khắc phục:
- Kiểm tra kết nối của encoder với bộ điều khiển.
- Vệ sinh encoder nếu bị bám bụi hoặc nhiễu tín hiệu.
- Kiểm tra cáp encoder xem có bị đứt, lỏng hay không.
4.2. Lỗi quá tải (overload error)
* Biểu hiện:
- Động cơ nóng lên nhanh.
- Hệ thống báo lỗi quá tải.
- Mô-men xoắn không đủ để kéo tải.
* Cách khắc phục:
- Kiểm tra xem tải có quá mức công suất định mức của động cơ không.
- Giảm tải hoặc thay động cơ có công suất lớn hơn.
- Đảm bảo bộ điều khiển (driver) phù hợp với động cơ.
4.3. Lỗi quá nhiệt (over temperature error)
* Biểu hiện:
- Động cơ nóng bất thường.
- Hệ thống báo lỗi nhiệt độ cao.
* Cách khắc phục:
- Kiểm tra hệ thống làm mát, quạt tản nhiệt.
- Giảm tải hoặc giảm thời gian hoạt động liên tục.
- Kiểm tra bộ phận bôi trơn để tránh ma sát quá lớn.
4.4. Lỗi mất pha (phase loss error)
* Biểu hiện:
- Động cơ rung giật, không chạy đúng hướng.
- Công suất suy giảm.
- Hệ thống báo lỗi pha động cơ.
* Cách khắc phục:
- Kiểm tra kết nối dây động cơ (có bị lỏng hay đứt không).
- Đảm bảo bộ điều khiển cung cấp đủ điện áp và dòng điện cần thiết.
4.5. Lỗi vượt quá tốc độ (overspeed error)
* Biểu hiện:
- Động cơ quay nhanh hơn mức cài đặt.
- Hệ thống báo lỗi tốc độ vượt mức.
* Cách khắc phục:
- Kiểm tra thông số gain trong bộ điều khiển servo.
- Điều chỉnh bộ PID để tránh tình trạng quá điều chỉnh.
- Kiểm tra tải trọng có phù hợp với động cơ không.
4.6. Lỗi nhiễu điện từ (electromagnetic interference - emi)
* Biểu hiện:
- Động cơ hoạt động không ổn định.
- Giá trị đo lường bị sai lệch.
* Cách khắc phục:
- Sử dụng bộ lọc nhiễu (EMI filter).
- Đảm bảo dây tín hiệu encoder được che chắn tốt, tránh bị nhiễu.
4.7. Lỗi mất kết nối với driver (communication error)
* Biểu hiện:
- Động cơ không phản hồi khi có lệnh điều khiển.
- Màn hình điều khiển báo lỗi kết nối.
* Cách khắc phục:
- Kiểm tra cáp tín hiệu RS232, RS485, hoặc EtherCAT
- Cài đặt lại thông số truyền thông trên bộ điều khiển.
5. Tổng kết
Động cơ Servo là giải pháp điều khiển chính xác được ứng dụng rộng rãi trong robot, CNC, dây chuyền sản xuất, máy móc tự động hóa mà chưa có giải pháp nào có thể so sánh được.
Trong quá trình sử dụng động cơ cần lưu ý:
- Thường xuyên bảo trì để tránh lỗi không mong muốn.
- Kiểm tra kết nối dây giữa động cơ, driver, encoder.
- Chọn đúng công suất động cơ phù hợp với tải.
- Cài đặt thông số điều khiển phù hợp để tránh lỗi quá tốc độ, quá tải.
