

HƯỚNG DẪN CÀI ĐẶT CHẾ ĐỘ UP DOWN CỦA BIẾN TẦN SCHNEIDER ATV610 SERIES

BƯỚC 1: VÀO NHÓM HÀM [FILE MANAGEMENT]FMT> [Factory settings] FCS
Cài hàm[Config. Source] FCS thành [Macro-Conf] i n i để tiến hành trả tất cả cài đặt về mặc định
Vào hàm [Parameter group list] FrY chọn [All] ALL để chọn tất cả các hàm
Vào hàm [Go to Factory settings] GFS rồi nhấn OK để tiến hành trả cài đặt vè mặc định, sau khi thực hiện sẽ tự động trả về màn hình [Factory settings] FCS
BƯỚC2: VÀO NHÓM HÀM [COMPLETE SETTINGS] CST > [COMMAND AND REFERENCE] CRP
Vào hàm [High Speed] HSP để cài tần số giới hạn trên “0-500Hz”(tần số này phải nhỏ hoặc bằng tần số trong hàm [Max Frequency] tFr)
Cài hàm [Freq Switch Assign] rFC thành [Ref Freq Channel 2]Fr2
Cài hàm [Ref Freq 2 Config] Fr2 thành [Ref Frequency via DI] Updt
BƯỚC 3: VÀO NHÓM HÀM [INPUT/OUTPUT] IO
Cài hàm [Reverse Assign] rrS thành [DI2] Li2 để gán chức năng quay ngược cho DI2
BƯỚC 4: VÀO NHÓM HÀM [Complete settings] CSt > [Motor parameters] MPA
Vào hàm [Max Frequency] tFr để cài đặt tần số tối đa mà biến tần có thể cho ra được “10-500Hz”
BƯỚC 5: VÀO NHÓM HÀM [COMPLETE SETTINGS] CST > [GENERIC FUNCTIONS] > [+/- SPEED] UPD
Vào hàm[+ Speed Assign] USP cài thành [DI3] Li3 để gán chức năng tăng tần số cho DI3
Vào hàm [Ref Frequency Save] Str cài thành [Save to RAM] rAM để cho phép lưu giá trị tần số vào RAM khi mất tín hiệu chạy hoặc cài thành [Save to EEprom] EEP cho phép lưu giá trị tần số vào EEPROM khi mất tín hiệu chạy hoặc mất nguồn của biến tần
ĐẤU DÂY
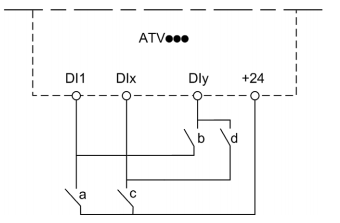

DI1(quay thuận với tiếp điểm a), DIx(quay ngược với tiếp điểm c), DI3(tăng giá trị tần số với tiếp điểm b cho DI1 và tiếp điểm d cho DIx)
Nguyên tắc hoạt động, khi tiếp điểm a đóng duy trì, mô tơ quay với tốc độ nhỏ nhất, khi tiếp điểm b đóng, tần số tăng mô tơ quay nhanh hơn, nếu cả a và b đều duy trì, tốc độ mô tơ sẽ tiếp tục tăng dần cho đến khi đạt mức tần số giới hạn trên, khi b hở ra mô tơ sẽ duy trì tốc độ ngay từ khi mất b. Khi nhả cả a thì mô tơ giảm tốc độ từ từ về 0. Trường hợp tương tự với c và d.
