

SƠ ĐỒ CHÂN SERVO DORNA EPS_B1

THÔNG TIN SƠ ĐỒ CHÂN SERVO DORNA EPS_B1
1/ Sơ đồ chân kết nối Drive và Motor loại Jack vuông.
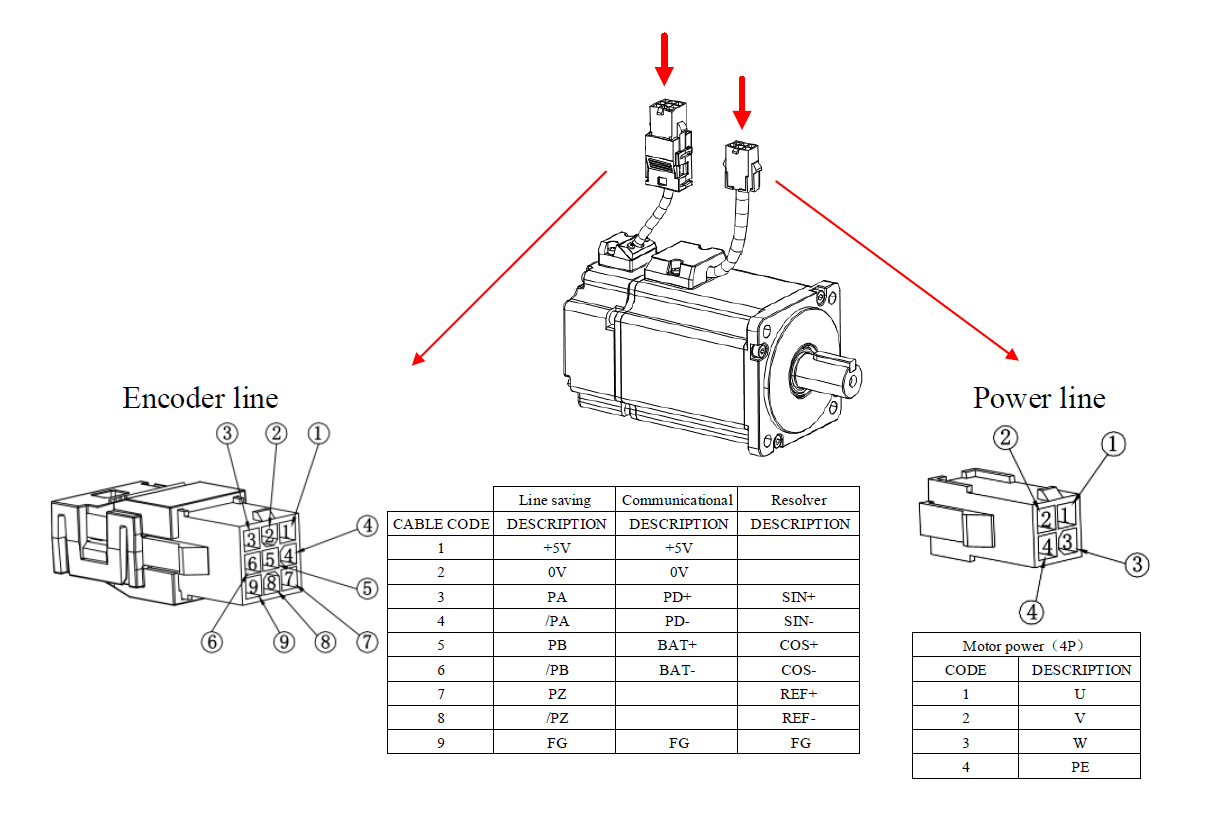
Chức năng chân Encoder loại Line Saving:
Chân 1: Chân nguôn +5V.
Chân 2: Chân nguôn 0V.
Chân 3: Chân tín hiệu xung A.
Chân 4: Chân tín hiệu xung /A (đảo).
Chân 5: Chân tín hiệu xung B.
Chân 6: Chân tín hiệu xung /B (đảo).
Chân 7: Chân tín hiệu xung Z.
Chân 8: Chân tín hiệu xung /Z (đảo).
Chân 9: Chân FG chân tiếp địa (Ground).
2/Sơ đồ chân kết nối Drive và Motor loại Jack tròn.
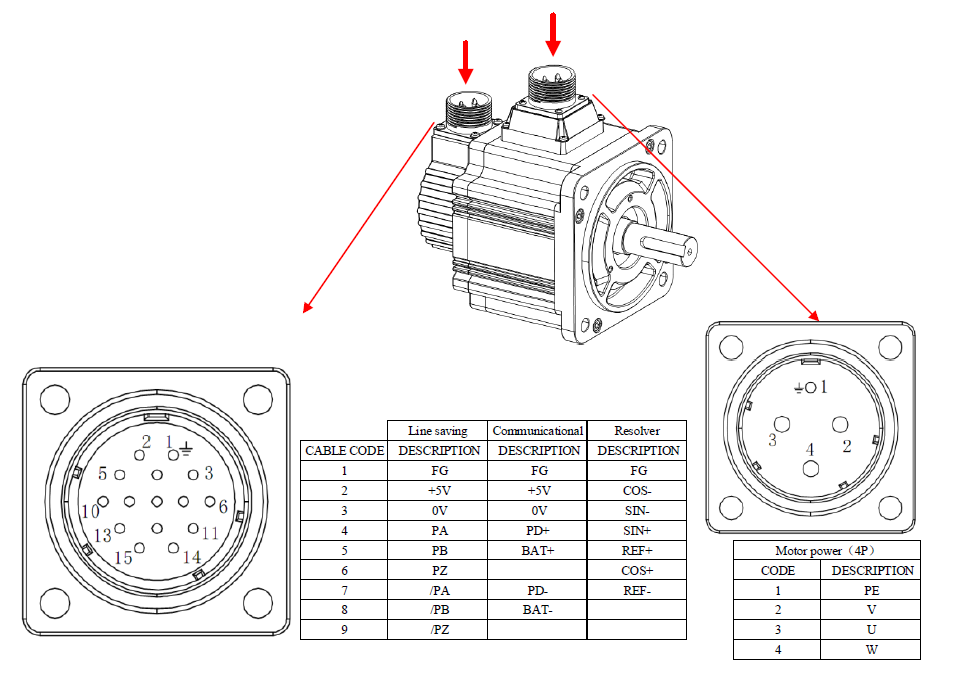
Chức năng chân Encoder loại Line Saving:
Chân 1: Chân FG chân tiếp địa (Ground).
Chân 2: Chân nguôn +5V.
Chân 3: Chân nguôn 0V.
Chân 4: Chân tín hiệu xung A.
Chân 5: Chân tín hiệu xung /A (đảo).
Chân 6: Chân tín hiệu xung B.
Chân 7: Chân tín hiệu xung /B (đảo).
Chân 8: Chân tín hiệu xung Z.
Chân 9: Chân tín hiệu xung /Z (đảo).
3/Sơ đồ chân cổng RJ54
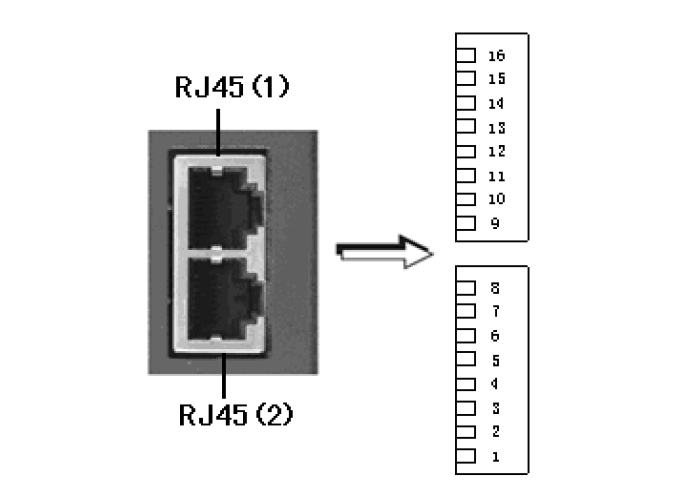

Chân 1,9 chân RS485+
Chân 2,10 chân RS485-
Chân 3,11 chân GND (Ground)
Chân 6,11 chân GND (Ground)
Chân 7,15 chân CAN-H
Chân 8,16 chân CAN-L.
Yêu cầu dùng dây có bọc giáp.
4/Sơ đồ chân cổng CN2 (50 chân)

Các chân ngõ vào cơ bản:
Chân 40: S-ON Chân điều khiển Servo on.
Chân 41: C-MOD chần chuyển mode hoạt động hàm PA000
(Nhà sx mặc định là điều khiển Position & Speed)
Chân 42: POT chân giới hạn chiều thuận. Servo sẽ dừng khi nó bật ON.
Chân 43: NOT chân giới hạn chiều ngược. Servo sẽ dừng khi nó bật ON.
Chân 44: CLR chân xóa bộ đếm xung khi điều khiển vị trí.
Chân 45: A-Restart chân reset lỗi, khởi động lại.
Chân 46: INHIBIT chân ngắt xung ngõ vào.
Chân 48: ZEROSPD chân duy trì vị trí đứng yên khi ON.
Chân 47: COM+ chân nhận nguồn 24VDC bên ngoài
Các chân ngõ vào điều khiển vị trí:
Chân 16: HPULS+ chân xung tốc độ cao (+).
Chân 17: HPULS- chân xung tốc độ cao (-).
Chân 23: HSIGN+ chân kích tốc độ cao (+).
Chân 24: HSIGN- chân kích tốc độ cao (-)
Chân 7: PULS+ chân xung tốc độ thấp (+).
Chân 8: PULS- chân xung tốc độ thấp (-).
Chân 11: SIGN+ chân kích tốc độ thấp (+).
Chân 12: SIGN- chân kích tốc độ thấp (-)
Chân 3: PL Chân tín hiệu xung thường mở.
Các chân ngõ vào điều khiển Tốc độ:
Chân 5: V-REF Chân điện áp ngõ vào điều khiển tốc độ.
Chân 6: AGND chân 0V điện áp ngõ vào.
Các chân ngõ vào điều khiển Moment:
Chân 9: T-REF Chân điện áp ngõ vào điều khiển moment.
Chân 10: AGND chân 0V điện áp ngõ vào.
Các chân ngõ ra điều khiển vị trí:
Chân 33: PAO+ chân xung pha A ngõ ra(+).
Chân 34: PAO- chân xung pha A ngõ ra (-).
Chân 35: PBO+ chân xung pha B ngõ ra(+).
Chân 36: PBO- chân xung pha B ngõ ra (-).
Chân 19: PZO+ chân xung vị trí gốc (pha Z) ngõ ra(+).
Chân 20: PZO- chân xung vị trí gốc (pha Z) ngõ ra (-).
Chân 31: ALM+ chân ngõ ra tín hiệu Alarm (+).
Chân 32: ALM- chân ngõ ra tín hiệu Alarm(-)
(Chân này sẽ OFF khi xuất hiện tín hiệu lỗi)
Chân 29: COIN+ chân ngõ ra tín hiệu hoàn thành(+).
Chân 30: COIN- chân ngõ ra tín hiệu hoàn thành (-).
(Chân này sẽ hoạt động khi xung sai lệch nhỏ hơn hàm PA525)
Chân 27: CZ+ ngõ ra xung pha Z (+).
Chân 28: CZ- ngõ ra xung pha Z (-)
Chân 25: BK+ ngõ ra thắng ngoài (+).
Chân 26: BK- ngõ ra thắng ngoài (-)
Chân 4: MON ngõ ra analog +/- 8VDC tốc độ, torque (+).
Chân 1: SG- ngõ ra analog +/- 8VDC tốc độ, torque (-)
5/Quy trình kiểm tra định kỳ:
Kiểm tra hàng ngày trước khi vận hành.
1/Kiểm tra xem thiết bị có bị bụi bẩn, tạp chất.
2/Kiểm tra xem thiết bị có rung động hày âm thanh bất thường không.
3/Kiểm tra nguồn ngõ vào có bình thường không.
4/Kiểm tra xem có sợi, xơ hay lông dính vào các cánh, lỗ thông gió không.
5/Kiểm tra các vị trí kết nối cáp có sạch hay không.
6/Kiểm tra các đầu nối động cơ và Driver xem có bị lỏng hay lệch vị trí không.
7/Kiểm tra tải kết cấu cơ khí xem có bị kẹt hay lỗi không.
